Ekspertsykehuset
Navigert kirurgi
Visste du at vi kan lage kart over hjernen ved hjelp av fusjonerte CT- og MR-bilder? For så operere dette? Dagens teknologi gjør det mulig å operere dypt inne i hjernen på en tryggere og mer skånsom måte enn tidligere.
Tekst: Morten Olsen, avdelingsingeniør, OUS. Foto: Morten Olsen, OUS, privat og Brainlab.
Morten Olsen jobber som avdelingsingeniør ved Medisinsk-teknologisk avdeling på Rikshospitalet. Han har hovedansvar for blant annet navigasjonssystemene ved operasjonsgangene. I tillegg rykker han ut på mye av de akutte hendelsene ved operasjonsstuene og intensivavdelingene.
Hva er navigert kirurgi?
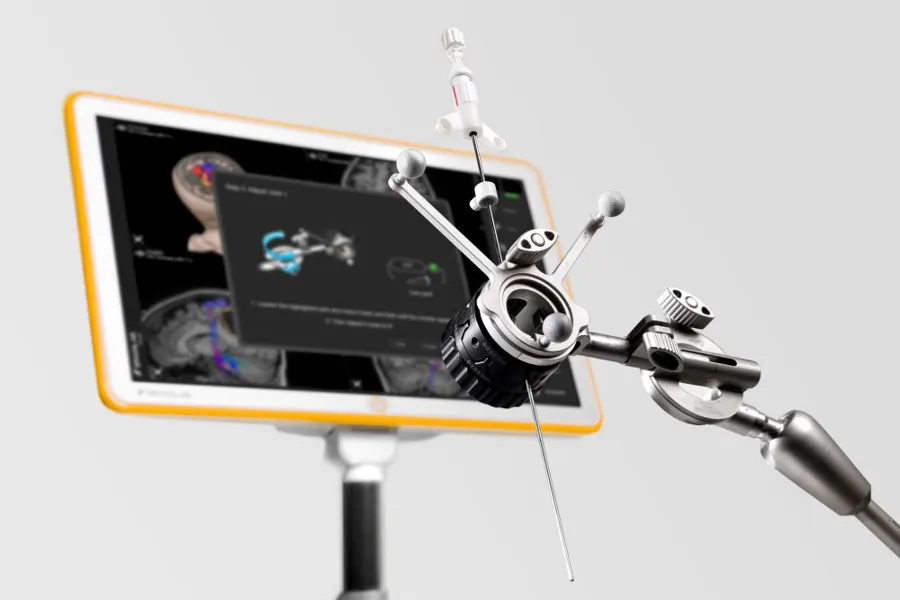
Med dagens teknologi er det mulig å gjennomføre komplisert kirurgi langt tryggere enn på den tradisjonelle måten. I OUS har vi etablert en felles planleggingsplattform for navigert kirurgi som benyttes på tvers av lokasjonene. Det vil si at kirurgene kan sitte på kontoret sitt og planlegge kirurgien på fusjonerte bilder (CT/MR) ned i minste detalj.
Planen blir en tredimensjonal bildeblokk som man kan benytte til navigasjon. I denne planen er det mulig å tegne inn tumorer, nervefiber, trajektorier også videre.
Når planen er klar, hentes den opp på et MTU (medisinsk-teknisk utstyr) inne på operasjonsstuen som benyttes aktivt under hele kirurgien.

Typer navigasjon
Det er to hovedtyper teknologi som benyttes til dette; optisk og magnetisk. Begge har sine fordeler og ulemper i forhold til metoden som benyttes. Optisk navigasjon benytter IR-lys til å detektere i arbeidsfeltet, mens magnetisk benytter magnetfelt.
Av de to systemene har IR-systemene litt bedre presisjon. Noe av årsak til det er at magnetfeltet som sendes ut fra referansen vil påvirkes av metaller i operasjonsfeltet og gir små avvik.
En fordel med magnetisk navigasjon er at man kan benytte fleksible instrumenter med en liten referanse i tuppen. Man kan da bevege seg i trange kanaler (for eksempel bihuler) og vite til enhver tid hvor man jobber uten å benytte bildedannende teknologi.
Dette er ikke en mulighet for IR-systemene som trenger fri sikt til referansen. Blir noe av lyset/refleksen borte vil systemet ikke fungere.
Så hvordan fungerer det?
På den optiske navigasjonen er hodet til pasienten festet i en klave som igjen har en referanse festet til seg. Dette sørger for at hodet til enhver tid har samme posisjon i forhold til referansen. Den optiske navigasjonen sender ut pulserende IR-lys som treffer referansen festet på pasienten. Dette lyset reflekteres og detekteres av systemet.
Kirurgen lager en punktsky av den faste strukturen på pasientens ansikt/hode hjelp av en laserpeker. Navigasjonsenheten vil så prøve å matche denne punktskyen med de fusjonerte CT/MR-bildene som kirurgen allerede har laget en plan ut ifra.
Når MTU`et finner en god match mellom punktskyen og bildeplanen vil man få en godkjenning av pasientregistreringen og kunne gå i gang med verifisering av nøyaktigheten på systemet. Vi benytter da instrumenter (pekere) med påmonterte referanser.
Ved bekreftelse av høy nøyaktighet (sub millimeter er ønskelig) kan det kirurgiske inngrepet starte. Ut ifra avansert kalkulasjon i MTU`et vil en kunne beregne eksakt posisjon på både pasient og instrumentene som har referanser på seg.
Ved bruk av disse instrumentene med referanse under kirurgi kan MTU vise på egen skjerm hvor i hjernen kirurgen jobber. Når kirurgen for eksempel skal fjerne en tumor, vil hen kunne se når hen jobber i tumor og når hen nærmer seg friskt hjernevev ved bruk av navigasjon. På denne måten vet kirurgen når nok av tumoren er fjernet.

Operere i blinde (magnetisk)
Likt det optiske systemet har også det magnetiske systemet en referanse på pasienten. Dette er en elektronisk komponent, og ikke en lysreflekterende enhet.
I stedet for kamera som ser ned i arbeidsfeltet, plasseres en «magnetboks». Dette er en boks som inneholder flere spoler som setter opp magnetfelt i mange retninger. Ut ifra dette kalkulerer MTU`et posisjoneringen av instrumenter og pasientreferansen ut ifra strømmen som genereres i pasientreferansen fra magnetfeltene.
I og med at det benyttes magnetisme, og ikke lys, kan tynne fleksible instrumenter benyttes når det er behov for å gå dypt inn i f.eks. bihuler. Man vet da eksakt hvor en befinner seg, uten å benytte bildedannende teknologi.
Bruk av intraoperative bilder og navigasjon
Velger her å se litt på optisk navigasjon og dens muligheter under kirurgi. Når dura (hjernehinnen) åpnes vil man kunne få et fenomen som kalles «brainshift». Det betyr at hjernen endrer litt posisjon pga. at «posen» den ligger i ikke lenger er intakt.
Med dagens MTU kan dette kompenseres for, men optimalt sett vil man gjerne ha korrekte bilder å jobbe etter. Vi har da mulighet for å ta nye bilder med pasient i narkose på operasjonsbordet.
Her finnes det flere muligheter, blant annet CT på skinner i gulvet og store robotarmer med bildedannende teknologi. Det gir mulighet for raskt å få de nye bildene inn i navigasjonssystemet og jobbe videre med korrekte bilder. Den bildedannende teknologien er meget fordelaktig ved fjerning av tumor, da det gir mulighet til å se om tilstrekkelig vev er fjernet.
Navigasjon sammen med annet MTU
Det finnes spennende muligheter som virkelig er til pasientens beste. På Parkinson pasienter kan vi bruke elektroder for å kunne stimulere inne i hjernen. Elektrodene plasseres ved bruk av navigasjonssystemet.
De plasseres med millimeterpresisjon for dyp hjernestimulering (Deep Brain Stimulation). Kun ved å bore et lite hull i kraniet kan man plassere elektrodene ved hjelp av navigasjonssystemet med meget høy presisjon.
For å verifisere plasseringen av elektrodene i hjernen benyttes bildedannende teknologi. Da er vi helt sikker på at elektrodene ligger optimalt plassert. Etter denne typen kirurgi kan ofte Parkinson pasientene leve tilnærmet normalt uten skjelving.
Celleprøve av hjernen, gjennom et lite hull
Tidligere ble store og komplekse hodeklaver benyttet. Plassering og justering av disse krevde lang tid. Med navigasjonssystem er prosessen mye raskere, siden dette gir en visuell guide fra MTU`et om retning og dybde på stikket.
På navigasjonssystemet kan vi da følge dybden/retning på biopsinålen, så vi kan være sikker på at prøven tas fra ønsket område med langt høyere presisjon enn tidligere.
For enda høyere presisjon kan en robot benyttes for hele navigasjonsoppgaven, med kirurgen som gjennomfører selve stikket. I tillegg kan den bildedannende teknologien benyttes til verifisering når biopsi skal tas dypt inne i hjernen, mens pasienten fortsatt ligger på operasjonsbordet.
Teknologi til fordel for pasienten
Disse hjelpemidlene er allerede tilgjengelig på OUS, med unntak av robot. For pasientene våre betyr dette at de får en tryggere og mer nøyaktighet i behandlingen de mottar. Vi som jobber på MTA i Teknologi – og innovasjonsklinikken (TIK) streber for at vi skal få enda flere og bedre MTU inn på operasjonsstuen slik at pasientene kan dra nytte av dette.
Det er helt sikkert mye mer som kan sies om dette tema, men dette var en kort tolkning fra en ingeniørs ståsted.
Les og lær mer!
- Følg OUS medtek på instagram: @medisinteknologi_ous
- Følg Morgen Olsen på hans jobbinstagram: @medtek_rikshospitalet
- Les mer om Medisinsk teknologisk avdeling ved Teknologi og innovasjonsklinikken, Oslo universitetssykehus.
- Les flere blogginnlegg fra Ekspertsykehuset!